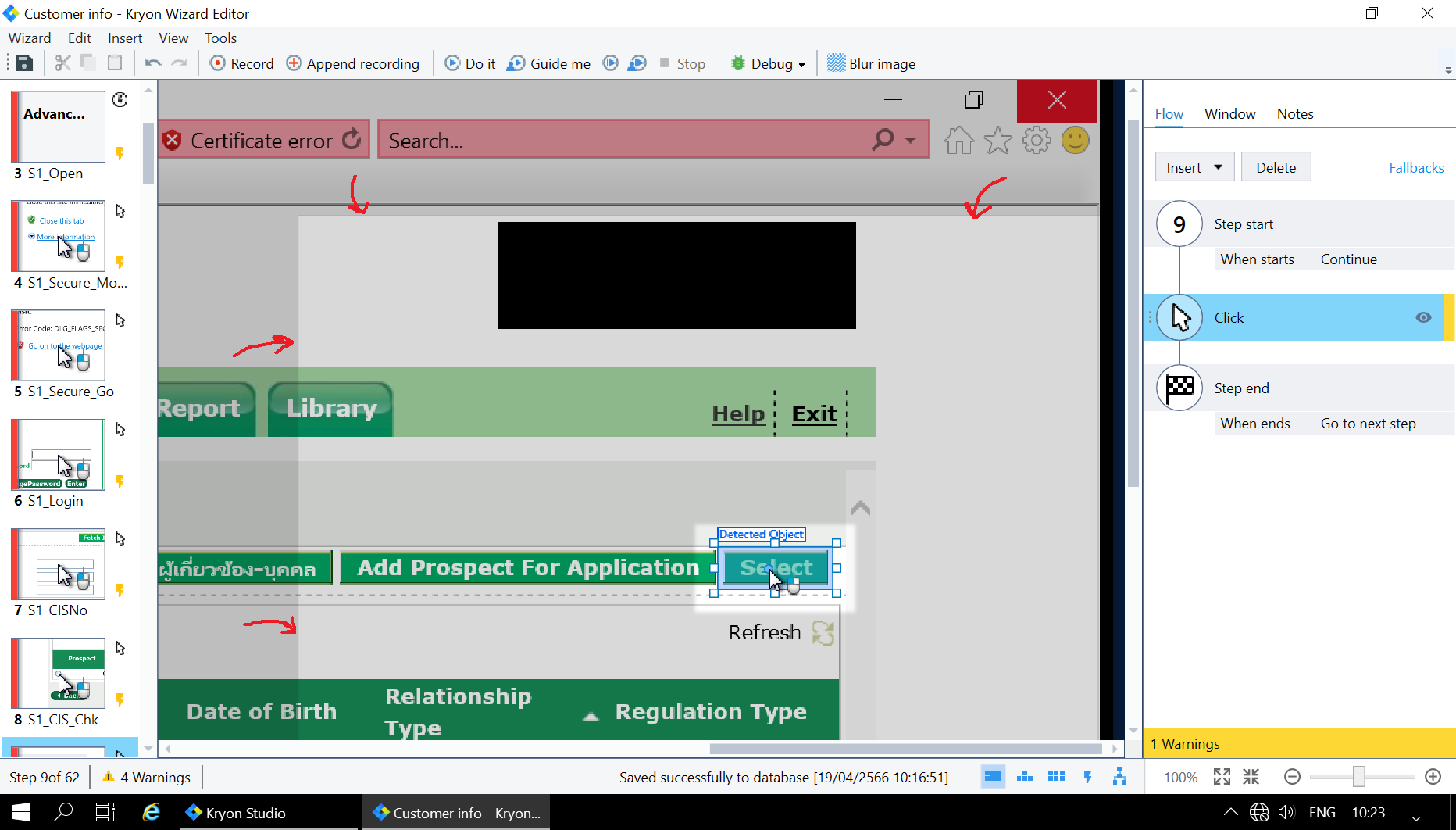
I have used ‘Detect object’ position for finding target object,
First setting from ‘Record’ function by click on object, after that i tried debug that work well. called this step as ‘Ref’.
After developing to other phase and come back to debug ‘Ref’. i found robot searching slip out of target area. (miss focus area from first setting.
Both condition, used same window size and application size (means all condition was same) So how to set focus point for search option with ‘Detect object’ ?
Remark: i tried to used ‘Fixed position’ and ‘Relative position’ but not interested nether than ‘Detect object’.
Best answer by Eli_Shteinberg
Hey @Qootaro,
For getting the best resolute for web-based automation, our recommendation is to use the HTML DACs, Using the HTML commands will not change the resolution of the element you want to detect by any page or other factors. This is the most reliable way to detect any object on the web page.
For getting the best resolute for web-based automation, our recommendation is to use the HTML DACs, Using the HTML commands will not change the resolution of the element you want to detect by any page or other factors. This is the most reliable way to detect any object on the web page.
Hello - i was wondering if you’re using 100% on DPI settings on the machine you’re recording.
Secondly - as @Eli_Shteinberg mentioned - we usually recommend removing the click core object (don’t remove the step - just the click under “flow settings” and replace them by advanced commands (e.g. html).
Third: the click core object you have used has a warning (object may not be unique, static or clean). If you prefer to stick to a visual click, maybe use an offset by first hovering over the blue dot and dragging it to a different object in the area - this is now your new object to be IMR’ed by NIntex Kryon RPA. Then press shift and hover over the dot on the new selected object and drag the line (orange) to the object you want to click on.
Then run the wizard again and see if that helped. If not let us know.